
Dans le monde du drone FPV, comprendre la mécanique et l’électronique embarquée est crucial pour optimiser tes performances en vol. Les essais de moteurs et d’ESC, ces éléments souvent confondus mais aux rôles bien distincts, déterminent la maniabilité, la vitesse et la précision de ton drone. Ces composantes doivent non seulement être compatibles entre elles, mais aussi adaptées à ton style de pilotage, que ce soit pour du freestyle fluide ou du drone racing explosif. Ce guide t’emmène au cœur des différences entre moteurs drone et contrôleurs ESC, afin d’affiner ton choix matériel et maximiser l’efficacité de ton setup.
Les réponses aux questions clés sur le fonctionnement ESC, le diagnostic moteur et le tuning ESC te seront dévoilées, illustrées par des exemples concrets et des analyses techniques sur la performance drone. Si tu souhaites éviter de mauvaises surprises en vol et gagner en compétitivité, plonger dans ces essais ESC et moteurs pourra changer la donne. On décortique aussi le rôle du firmware et l’impact des protocoles de communication sur la réactivité de ton engin. Prépare-toi à une immersion technique, tout en restant accessible pour s’adapter à tous les profils de pilotes FPV.











En bref :
- Les différences essentielles entre moteurs drone et ESC résident dans leur fonctionnement : les moteurs génèrent la propulsion tandis que les ESC contrôlent précisément leur vitesse.
- Le choix entre ESC individuel et ESC 4 en 1 impacte la facilité de réparation, le poids et la gestion du câblage.
- Le firmware ESC, notamment BLHeli_32 versus BLHeli_S, influence les fonctionnalités avancées comme le turtle mode ou la télémétrie.
- Adapter l’ampérage de l’ESC à la consommation maximale du moteur est essentiel pour assurer une performance fiable et protéger le matériel.
- Les protocoles modernes comme DShot 1200 sont un atout pour une réponse moteur fluide et rapide, vitale en drone racing et freestyle.
Fonctionnement et rôle essentiels : comprendre les différences entre moteurs drone et ESC
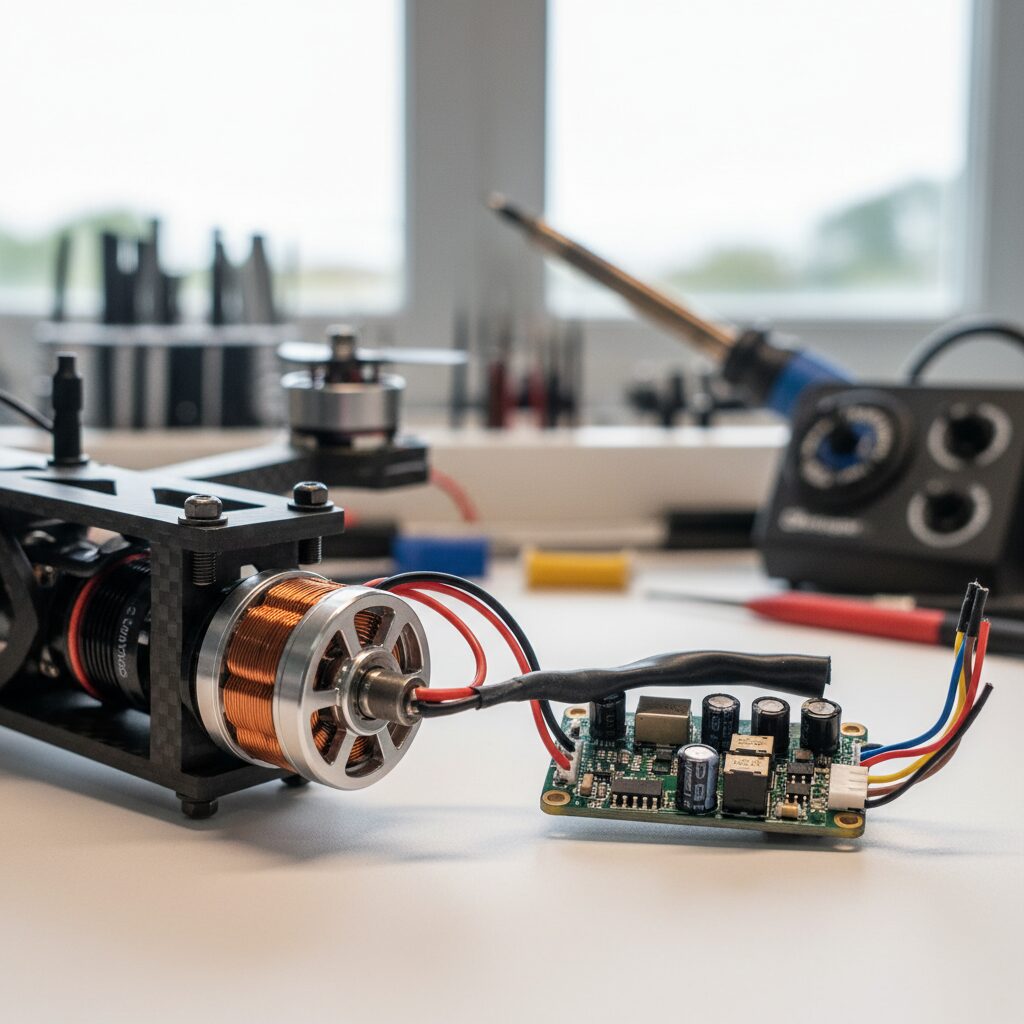
À première vue, les moteurs drone et les ESC sont intimement liés, mais leur rôle dans le système de propulsion d’un drone FPV reste distinct. Le moteur drone brushless est la pièce qui transforme l’énergie électrique fournie par la batterie en mouvement mécanique pour faire tourner les hélices. Sans lui, pas de propulsion, pas de vol. Les moteurs sont définis par leur KV (nombre de tours par minute par volt), leur taille et leur poids, qui influencent directement la maniabilité, la vitesse drone et la consommation électrique.
L’ESC, ou Electronic Speed Controller, agit comme le maestro qui orchestre la vitesse du moteur. Recevant les signaux du contrôleur de vol, il module la puissance envoyée au moteur brushless pour obtenir la vitesse souhaitée en un temps record, garantissant une précision et une réactivité adaptées au pilotage exigeant du FPV. En somme, c’est le lien direct entre ta manette des gaz et la rotation de tes hélices.
Un point important à saisir : chaque moteur brushless nécessite un ESC dédié. Sur un quad, tu trouveras ainsi 4 ESC individuels ou un module 4 en 1 qui combine tous les ESC dans une seule carte. Cette structure globale coordonne parfaitement le contrôle moteur drone tout en minimisant l’encombrement. C’est l’essence même d’un setup performant, avec un ESC de qualité évitant les à-coups et offrant une expérience de vol fluide et sensible.
Pour appuyer cela, consulte le guide comprendre les contrôleurs de vitesse électroniques ESC de drone qui explique en détail comment chaque composant interagit au sein du drone.
| Composant | Rôle | Impact sur la performance FPV | Exemple pratique |
|---|---|---|---|
| Moteur brushless | Convertit énergie électrique en rotation | Influence la vitesse drone et la maniabilité | Moteurs 1800KV pour un pilotage rapide et nerveux |
| ESC (contrôleur électronique de vitesse) | Régule la vitesse de rotation du moteur via signal | Assure la précision et la réactivité du contrôle moteur | ESC BLHeli_32 avec DShot 1200 pour un contrôle ultra-précis |

Choisir entre ESC individuel et ESC 4 en 1 : poids, facilité et réparabilité
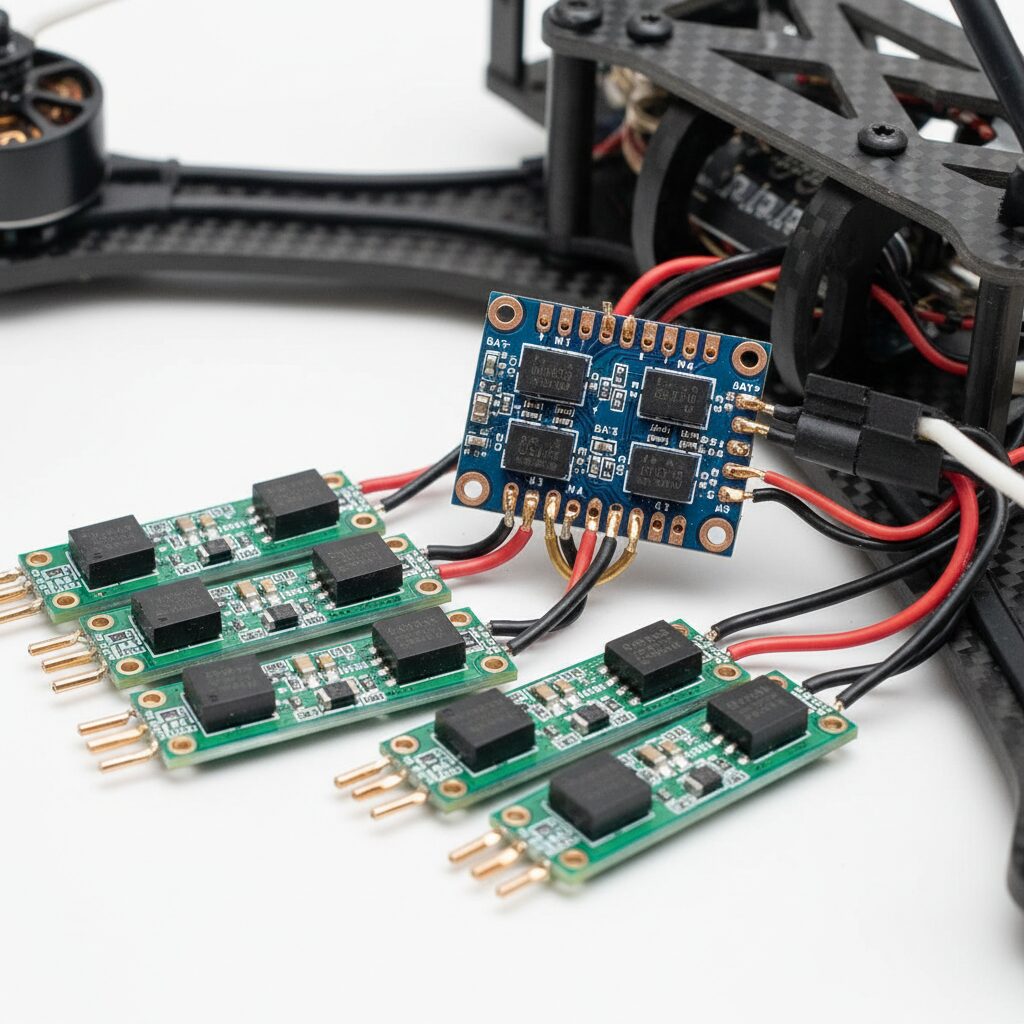
Quand vient le moment de sélectionner tes ESC drone, comprendre les différences fonctionnelles entre un ESC individuel et un ESC 4 en 1 s’impose. Le modèle 4 en 1 regroupe les 4 ESC dans une seule carte compacte qui s’empile généralement sur la flight controller. Cela facilite beaucoup le câblage et l’installation, et permet un look plus épuré et léger. Si tu cherches un drone FPV avec un minimum de fils et une structure soignée, ce type d’ESC répond parfaitement à cette attente.
Cependant, cette configuration présente un point faible important : la réparabilité. Si un ESC d’un module 4 en 1 grille, c’est la totalité du composant qu’il faudra remplacer, ce qui peut s’avérer coûteux, particulièrement en usage intensif ou pour les pilotes débutants plus enclins aux crashs fréquents.
À l’inverse, les ESC individuels, soudés sur le bras, sont plus volumineux et demandent un câblage un peu plus complexe. Mais leur avantage majeur est la simplicité du remplacement. Un ESC défaillant s’extrait aisément sans toucher aux autres. Cette approche plus modulaire et économique est souvent conseillée aux débutants ou pour des setups personnalisés avec un tuning esc précis, permettant aussi de tester différents modèles de contrôleurs pour affiner la performance drone.
Retrouve des recommandations pour bien choisir ton ESC dans cet article dédié aux conseils pour choisir les ESC drone FPV. Pour les envies de légèreté, les ESC 4 en 1 modernes comme les Hobbywing XRotor Micro 65A 4en1 apportent un excellent compromis, tandis que des ESC individuels comme le T-Motor F35A restent un classique solide pour les pilotes cherchant simplicité de maintenance.
| Type d’ESC | Avantages | Inconvénients | Public cible |
|---|---|---|---|
| ESC 4 en 1 | Léger, installation simple, look épuré | Réparation complexe, coût élevé si panne | Pilotes expérimentés, drones haut de gamme |
| ESC individuels | Facile à remplacer, économique, personnalisable | Plus lourd, câblage plus complexe | Débutants, pilotes en tuning ESC et maintenance |

Le firmware ESC : BLHeli_32 versus BLHeli_S et impact sur les performances
Le firmware installé sur tes ESC conditionne les capacités électroniques du contrôle moteur drone. Aujourd’hui, deux micrologiciels principaux dominent le marché : BLHeli_S, une version plus ancienne 8 bits, et BLHeli_32, une version plus récente 32 bits avec plus de fonctionnalités. Le choix du firmware peut impacter directement ta sensation en vol lors d’un test ESC, notamment au niveau de la rapidité de réponse et de la fiabilité.
BLHeli_32, avec son processeur 32 bits, introduit de nouvelles possibilités comme la télémétrie détaillée (température ESC, courant consommé), l’inversion de rotation pour activer le fameux turtle mode qui permet de retourner un drone crashé sur le dos, et une compatibilité avec les protocoles numériques rapides tels que DShot 1200. Ces avancées garantissent un contrôle plus réactif et précis du moteur brushless.
En revanche, BLHeli_S reste une option parfaitement robuste pour les setups plus basiques ou les pilotes souhaitant un ESC économique et fiable. Il convient aux pilotes recherchant une simplicité sans forcément pousser au maximum les capacités du drone.
Si tu souhaites te plonger dans le tuning ESC adapté au firmware, la plateforme dédiée au tuning avancé de drone FPV offre un excellent complément d’informations.
| Firmware | Type de processeur | Fonctionnalités clés | Adapté pour |
|---|---|---|---|
| BLHeli_S | 8 bits | Interface simple, bonne stabilité | Pilotes basiques, setups économiques |
| BLHeli_32 | 32 bits | Télémétrie, turtle mode, DShot 1200 | Racers, freestylers exigeants, tuning avancé |

Adapter ampérage ESC et consommation moteurs drone pour un vol sans failles
La robustesse et la longévité de ton drone FPV passent par un choix judicieux entre l’ampérage de l’ESC et la consommation électrique du moteur. Un moteur brushless, notamment avec un KV élevé ou des hélices à pas fort, peut générer une demande en courant très importante. Un ESC insuffisamment dimensionné risque alors de surchauffer, de provoquer un arrêt brutal en vol, voire de griller.
Il est indispensable donc de choisir des ESC capables de supporter un courant continuel supérieur à la consommation maximale de tes moteurs. Par exemple, un moteur consommant 33 ampères à pleine puissance justifie l’emploi d’un ESC 40A pour une marge de sécurité confortable. Cette précaution évite d’endommager le matériel et améliore la durée de vie des composants, ce qui reste primordial pour la durabilité drone.
La batterie LiPo joue elle aussi un rôle déterminant dans cet équilibre car sa tension (3S, 4S, 6S) influence aussi l’ampérage disponible. Coupler un ESC 6S à une batterie adaptée garantit des plages de tension compatibles et un flux électrique stable. Pour approfondir, la communauté explique précisément comment choisir un ESC en fonction de ton moteur.
| Paramètre | Considérations | Conséquences | Exemple concret |
|---|---|---|---|
| Courant moteur max | Relevé par constructeur ou essais moteur | Surchauffe si ESC sous-dimensionné | Moteur 1800KV consommant 33A à 100 % gaz |
| ESC Ampérage continu | Doit dépasser consommation max moteur | Sécurise la longévité du matériel | ESC 40A choisi pour moteur 33A |
| Batterie LiPo | Tension et capacité adaptées | Flux stable, compatibilité électronique | LiPo 6S 1300 mAh utilisée pour soutien 40A |
Les protocoles et le tuning ESC : de la communication à la performance drone
Le dialogue entre ton ESC et le contrôleur de vol repose sur des protocoles de communication qui varient en rapidité et précision. Le choix de protocole impacte directement la réactivité du moteur, ce qui se ressent en pilotage FPV, que ce soit en freestyle ou en racing.
Les protocoles les plus anciens comme PWM offrent une latence élevée jusqu’à 2 ms, insuffisante pour les exigences actuelles. Aujourd’hui, les protocoles numériques tels que DShot 300, DShot 600 et le très rapide DShot 1200 font la différence en offrant une latence réduite jusqu’à 13,4 microsecondes. Cette vitesse supérieure se traduit par un contrôle moteur drone plus précis et fiable, essentiel pour les pilotes qui veulent du ressenti net dans les virages serrés ou les accélérations fulgurantes.
Tu peux consulter des exemples de tests ESC pour comprendre l’importance des protocoles sur la fluidité du vol et la performance drone. Les pilotes attentifs utilisent également le tuning ESC pour améliorer la réactivité des moteurs, tester des réglages de filtrage et affiner la réponse aux commandes. Le tuning ESC est la cerise sur le gâteau pour parfaire ta machine et ton style de pilotage.
| Protocole | Latence | Avantages | Compatibilité |
|---|---|---|---|
| PWM | 1000-2000 µs | Simple, vieille norme | Presque plus utilisé |
| Oneshot125 | 125-250 µs | Plus rapide que PWM | Bon pour ESC BLHeli_S |
| DShot 300 | 53.4 µs | Numérique, sans calibrage nécessaire | Très courant sur BLHeli_32 |
| DShot 1200 | 13.4 µs | Latence très faible, haute précision | Top niveau ESC moderne |
En maîtrisant le tuning ESC et en choisissant bien le protocole, tu gagnes en performance drone et sensibilité du contrôle moteur.drone FPV pour voler au maximum de ses capacités.
Quelle est la différence principale entre un moteur drone et un ESC ?
Le moteur drone convertit l’énergie électrique en rotation mécanique alors que l’ESC gère la vitesse et la puissance envoyées au moteur selon les commandes du contrôleur de vol.
Faut-il préférer un ESC individuel ou un ESC 4 en 1 ?
Les ESC individuels offrent une meilleure réparabilité et sont plus économiques pour les débutants. Les ESC 4 en 1 proposent un gain de place et un câblage simplifié, adaptés aux setups compacts.
Pourquoi choisir un ESC avec firmware BLHeli_32 ?
BLHeli_32 permet des fonctionnalités avancées comme la télémétrie, le turtle mode, et supporte des protocoles numériques rapides pour un contrôle plus précis.
Comment choisir l’ampérage de son ESC ?
Tu dois choisir un ESC dont l’ampérage continu dépasse la consommation maximale de ton moteur pour éviter les surchauffes et retours de planeur inattendus.
Quels protocoles ESC privilégier pour le drone racing FPV ?
Les protocoles DShot 600 et DShot 1200 sont privilégiés pour leur faible latence, garantissant un pilotage ultra-réactif et précis.
Je te partage ici tout ce que j’ai appris sur les drones FPV : réglages PID, choix du meilleur drone de course 5 pouces, optimisation moteurs, batteries LiPo et techniques de pilotage en freestyle ou racing. J’analyse chaque modèle comme si je devais partir en compétition avec, pour t’aider à progresser plus vite et à choisir un drone FPV vraiment adapté à ton style de vol.